
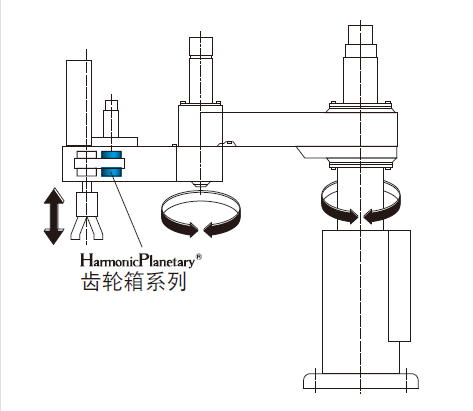
水平多关节工业机器人,包括底座,底座上设置有下臂,下臂上设置有上臂,上臂的右侧设置有驱动电机、主动带轮、从动带轮、花键轴、谐波减速机以及传动轴,驱动电机竖直设置在主动带轮的上方,主动带轮在驱动电机的驱动下进行转动,从动带轮设置在主动带轮的右侧并通过同步带与主动带轮同步转动,从动带轮的中心竖直设置有传动轴,传动轴贯穿从动带轮且向下延伸形成延伸部,谐波减速机设置在传动轴的延伸部上,传动轴的中心设置有花键轴,花键轴贯穿谐波减速机并向外延伸,谐波减速机通过花键母与传动轴固定连接。
谐波减速机主要特点:
(1)传动比大,单级为50—300;
(2)传动平稳,承载能力高;
(3)传动效率高,可达70%—90%;
(4)传动精度高,比普通齿轮传动高3—4倍;
(5)回差小,可小于3;
(6)不能获得中间输出,柔轮刚度较低。
谐波减速机在机器人技术比较先进的国家已得到了广泛的应用。仅就日本来说,机器人驱动装置的60%都采用了谐波传动。
点
击
隐
藏


 QQ咨询
QQ咨询